18/09/2025
Imaginați-vă mașina dumneavoastră ca pe un organism uman, unde fiecare componentă lucrează în armonie perfectă pentru a asigura funcționarea optimă. În acest scenariu, CAN Bus (Controller Area Network) este sistemul nervos digital, o rețea de comunicare esențială care permite unităților de control electronic (ECU) să interacționeze rapid și fiabil, fără a depinde de un computer gazdă central. De la sistemul de frânare la motor, informațiile vitale sunt partajate instantaneu, transformând vehiculul într-un sistem inteligent și coordonat. Această tehnologie, dezvoltată inițial de Bosch în anii '80, a devenit coloana vertebrală a comunicațiilor în aproape toate vehiculele moderne și în multe utilaje industriale, datorită simplității, eficienței și robusteții sale excepționale.
Fiecare ECU, sau nod CAN, este conectat la un magistral cu două fire torsadate: CAN High și CAN Low. Aceste fire, adesea codificate prin culori (CAN High galben, CAN Low verde), transmit semnale diferențiale, o metodă care conferă sistemului o imunitate ridicată la interferențe electromagnetice. Această arhitectură simplă, dar puternică, a revoluționat modul în care componentele vehiculelor comunică, reducând complexitatea cablajului și sporind fiabilitatea generală a sistemelor.
- Ce este o Unitate de Control Electronic (ECU)?
- Conectarea la un CAN Bus
- Variante ale CAN Bus
- Alte Protocoale de Rețea Auto
- Cele 4 Beneficii Cheie ale CAN Bus
- Istoria CAN Bus pe Scurt
- Viitorul CAN Bus
- Stratul Fizic și de Legătură de Date CAN
- Ce este un Cadru CAN?
- Erori CAN Bus
- Protocoale CAN de Nivel Superior
- Cum să Înregistrați Date CAN Bus
- Cum să Decodificați Datele CAN Brute în „Valori Fizice”
- Cazuri de Utilizare pentru Înregistrarea Datelor CAN
- Întrebări Frecvente (FAQ)
Ce este o Unitate de Control Electronic (ECU)?
O Unitate de Control Electronic (ECU) este o componentă vitală care gestionează funcționalități specifice într-un vehicul sau utilaj. Gândiți-vă la ECU-uri ca la organele specializate ale corpului: există o unitate de control a motorului, una pentru transmisie, pentru frâne, direcție, controlul temperaturii și multe altele. Un autovehicul modern poate avea cu ușurință peste 70 de ECU-uri, fiecare dintre ele schimbând constant informații cu celelalte pe magistrala CAN. Orice ECU de pe magistrală poate pregăti și transmite informații (de exemplu, date de la senzori), iar aceste date sunt acceptate de toate celelalte ECU-uri din rețea. Fiecare ECU verifică apoi datele și decide dacă le primește sau le ignoră, în funcție de relevanța lor pentru propria funcționalitate.
La o analiză mai atentă, o ECU este alcătuită din trei elemente primare:
- Microcontrolerul (MCU): Acesta este „creierul” ECU-ului. Interpretează mesajele CAN primite și decide ce mesaje trebuie transmise. De exemplu, un senzor ar putea fi programat să măsoare și să transmită temperatura uleiului la o frecvență de 5 Hz.
- Controlerul CAN: De obicei, integrat în MCU, acest controler asigură că toată comunicarea respectă protocolul CAN, gestionând codificarea mesajelor, detectarea erorilor și arbitrajul, reducând astfel complexitatea pentru microcontroler.
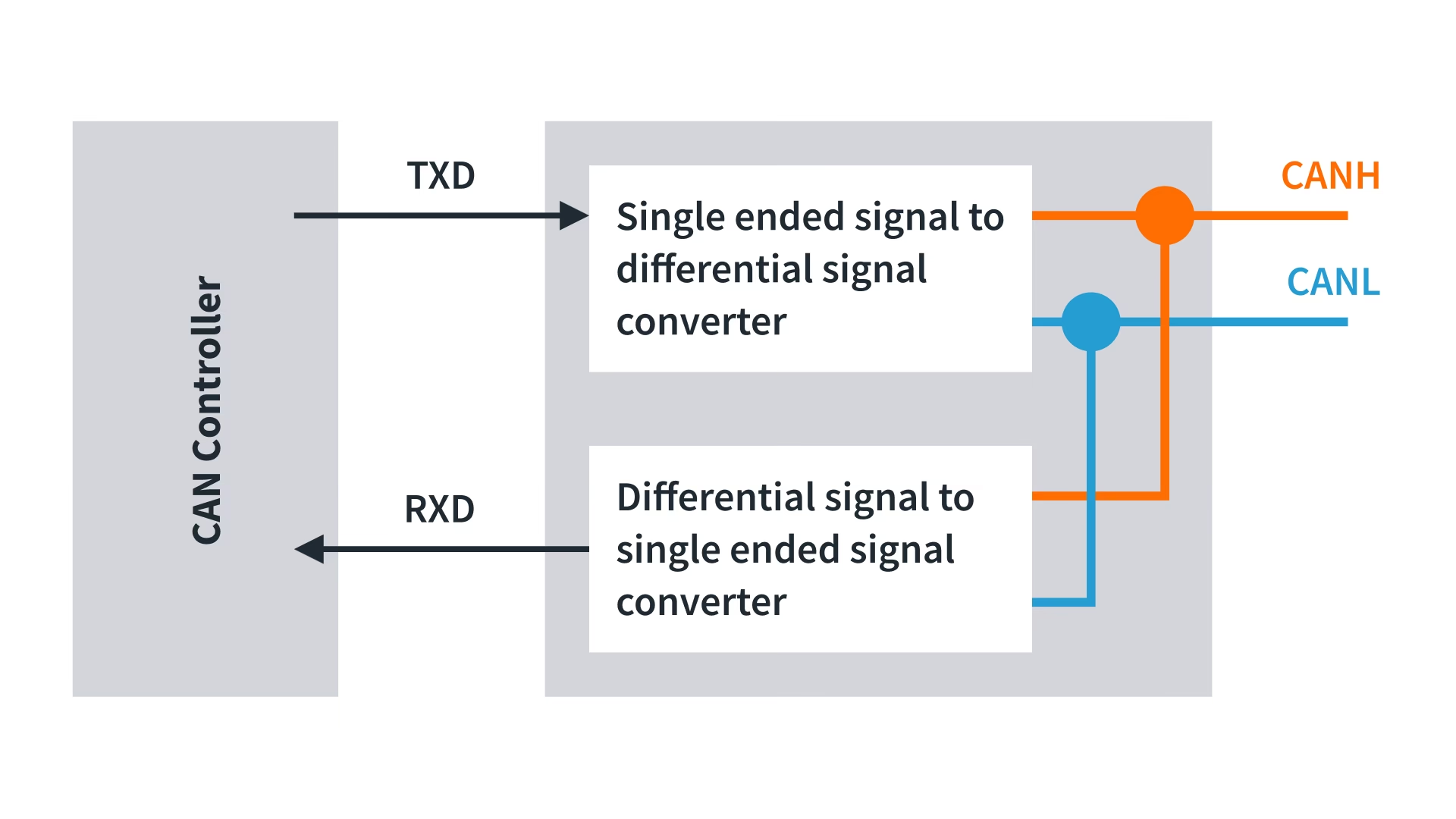
- Transceiverul CAN: Conectează controlerul CAN la firele fizice CAN, convertind datele controlerului în semnale diferențiale pentru sistemul CAN Bus și invers. De asemenea, oferă protecție electrică esențială.
Conectarea la un CAN Bus
Spre deosebire de alte sisteme, nu există un conector standard universal pentru aplicațiile CAN Bus. Aceasta înseamnă că diferite vehicule sau utilaje pot utiliza conectori variați. Cu toate acestea, un candidat apropiat pentru un standard este conectorul CAN DB9 (D-sub9), care a devenit standardul de facto pentru multe aplicații, inclusiv pentru înregistratoarele de date și interfețele CAN Bus. Popularitatea sa se datorează simplității și fiabilității.
Variante ale CAN Bus
Este util să știm că există mai multe variante ale protocolului CAN, fiecare optimizată pentru cerințe specifice:
- CAN de viteză redusă (Low-speed CAN): Cunoscut și sub denumirea de CAN tolerant la erori, este o opțiune economică atunci când toleranța la erori este critică. Cu toate acestea, este din ce în ce mai mult înlocuit de magistrala LIN pentru aplicații similare.
- CAN de viteză mare (High-speed CAN): Aceasta este varianta clasică a CAN (Classical CAN) și cea mai răspândită astăzi în industria auto și în utilaje. Articolul de față se concentrează în principal pe această variantă, dată fiind omniprezența sa.
- CAN FD (Flexible Data-rate): Oferă sarcini utile mai lungi și viteze mai mari de transmisie. Deși promite avantaje semnificative, adoptarea sa rămâne limitată, tranzitul de la Classical CAN fiind mai lent decât s-a anticipat.
- CAN XL: Această variantă oferă sarcini utile și mai lungi și viteze superioare, având rolul de a reduce decalajul dintre CAN și Ethernetul Auto (100BASE-T1), pregătind terenul pentru sisteme cu cerințe de lățime de bandă extrem de mari.
Alte Protocoale de Rețea Auto
În industria auto, pe lângă rețelele CAN, veți întâlni adesea și alte protocoale de rețea. Iată cele mai relevante, alături de o scurtă comparație:
| Protocol | Descriere și Cazuri de Utilizare | Viteză Maximă (aproximativ) | Cost / Complexitate |
|---|---|---|---|
| LIN bus | Supliment la rețelele CAN, cu costuri mai mici și mai puține cabluri. Folosit pentru funcții non-critice (aer condiționat, funcționalități uși). Un master LIN controlează până la 16 noduri slave. | 20 kbit/s | Redus |
| FlexRay | Oferă viteză superioară CAN-ului și toleranță la erori prin redundanță dual-channel. Utilizat în aplicații critice, dar este mai costisitor. Standardizat ISO 17458. | 10 Mbit/s | Ridicat |
| Ethernet Auto | Implementat pentru cerințe mari de lățime de bandă (ADAS, sisteme infotainment, camere). Oferă rate de transfer mult mai mari decât CAN, dar poate lipsi unele caracteristici de siguranță ale CAN. Coexistă cu CAN FD/XL în dezvoltări noi. | 100 Mbit/s (sau mai mult) | Variabil, în creștere |
Este important de reținut că, cel mai probabil, anii următori vor vedea o utilizare combinată a Ethernetului Auto, CAN FD și CAN XL în noile dezvoltări automotive și industriale, fiecare protocol fiind ales în funcție de cerințele specifice ale aplicației.
Cele 4 Beneficii Cheie ale CAN Bus
Standardul CAN Bus este utilizat în practic toate vehiculele și multe mașini datorită beneficiilor sale esențiale:
- Simplitate și Cost Redus: ECUs comunică printr-un singur sistem CAN, în loc de linii de semnal analogice complexe și directe. Aceasta reduce erorile, greutatea, cablajul și costurile.
- Complexitate redusă a cablajului: Sistemele tradiționale de cablare punct-la-punct ar necesita fire dedicate între fiecare nod, făcând sistemul costisitor și inflexibil. CAN Bus oferă o soluție mult mai eficientă, similară cu evoluția de la NMEA 0183 la NMEA 2000 în domeniul maritim.
- Reducerea greutății: Trecerea la CAN Bus poate contribui la reducerea greutății cablajului unui vehicul cu până la 20 kg, ceea ce duce la economii semnificative de combustibil.
- Scalabilitate: Popularitatea imensă a CAN-ului reduce costul tuturor componentelor, de la controlere și transceivers la cabluri, și, indirect, costuri precum cele ale hardware-ului de achiziție de date sau ale instruirii personalului.
- Acces Facil: Magistrala CAN oferă un singur punct de intrare pentru a comunica cu toate ECU-urile din rețea, permițând diagnosticarea centralizată, înregistrarea datelor și configurarea.
- Diagnosticare centralizată: Prin design, CAN Bus permite conectarea unei interfețe oriunde pe magistrală pentru a obține acces direct la 100% din trafic. Aceasta simplifică enorm diagnosticarea, eliminând necesitatea colectării individuale a datelor pentru fiecare nod.
- Înregistrare CAN silențioasă: În special, înregistrarea datelor CAN Bus poate fi efectuată în „mod silențios”, asigurându-se că dispozitivul nu afectează deloc magistrala CAN – un aspect critic pentru diagnosticare.
- Flash-uirea ECU-urilor: Puteți actualiza orice ECU din rețea prin CAN Bus, transmițând actualizări de firmware sau de configurare sub formă de cadre CAN. Acest lucru se realizează, de obicei, folosind protocoale de nivel superior precum UDS sau CCP/XCP.
- Standardizare: Majoritatea aplicațiilor CAN de astăzi partajează, de asemenea, protocoale de nivel superior care sunt standardizate la nivel de producători și mărci, sporind interoperabilitatea instrumentelor hardware și software.
- Extrem de Robustețe: Sistemul este rezistent la perturbații electrice și la interferențe electromagnetice – ideal pentru aplicații critice pentru siguranță (de exemplu, vehicule).
- Semnalizare diferențială: Interferențele electromagnetice (EMI) afectează ambele linii ale sistemului CAN Bus cu două fire în mod egal, făcând semnalul diferențial robust împotriva acestui tip de zgomot ambiental.
- Gestionarea erorilor: CAN asigură integritatea datelor prin detectarea extinsă a erorilor, inclusiv erori de bit, erori de „stuffing”, erori CRC, erori de format și erori ACK. Mai mult, nodurile pot fi configurate să retransmită automat mesajele defecte.
- Confinare: În plus, nodurile CAN sunt proiectate să-și monitorizeze propriile erori și să se deconecteze temporar/permanent de la magistrală dacă depășesc anumite praguri (cunoscut sub numele de „bus off”), prevenind astfel blocarea rețelei.
- Eficiență: Cadrele CAN sunt prioritizate prin ID, astfel încât datele cu prioritate maximă obțin acces imediat la magistrală, fără a provoca întreruperea altor cadre sau erori CAN.
- Arbitraj: Atunci când mai multe noduri CAN încearcă să transmită date în paralel, cadrul cu cel mai mic ID CAN (prioritate maximă) câștigă, în timp ce restul se retrag și reîncearcă. Acest lucru evită coliziunile și asigură că mesajele critice pentru siguranță sunt prioritizate.
- Utilizare: Arbitrajul ajută, de asemenea, la asigurarea unei bune utilizări a lățimii de bandă a magistralei CAN, „umplând eficient golurile” dintre mesajele critice cu mesaje de prioritate mai mică.
- Viteză: Deși Classical CAN este „lent” în comparație cu, de exemplu, Ethernetul Auto, oferă totuși o viteză suficientă pentru majoritatea aplicațiilor auto/industriale de astăzi. O singură magistrală CAN de 1 Mbit/s permite comunicarea a mii de cadre CAN pe secundă.
Istoria CAN Bus pe Scurt
Parcursul CAN Bus, de la o soluție inovatoare la un standard global, este unul remarcabil:
- Pre-CAN: ECU-urile auto se bazau pe cablaje complexe punct-la-punct, o soluție ineficientă și costisitoare.
- 1986: Bosch a dezvoltat protocolul CAN ca o soluție revoluționară pentru această problemă.
- 1991: Bosch a publicat specificația CAN 2.0 (CAN 2.0A cu identificator de 11 biți, 2.0B cu identificator de 29 biți).
- 1993: CAN este adoptat ca standard internațional (ISO 11898), marcând recunoașterea sa globală.
- 2003: ISO 11898 devine o serie de standarde, reflectând extinderea și diversificarea aplicațiilor.
- 2012: Bosch a lansat CAN FD 1.0 (Flexible Data Rate), o evoluție menită să răspundă cererii de viteze mai mari și sarcini utile mai extinse.
- 2015: Protocolul CAN FD este standardizat (ISO 11898-1).
- 2016: Stratul fizic CAN pentru rate de date de până la 5 Mbit/s este standardizat în ISO 11898-2 (în practică, până la 8 Mbit/s).
- 2018: CiA (CAN in Automation) începe dezvoltarea CAN XL, o nouă generație de CAN.
- 2024: CAN XL este standardizat (ISO 11898-1:2024, 11898-2:2024).
Astăzi, CAN este un standard omniprezent în autovehicule (mașini, camioane, autobuze, tractoare), nave, avioane, baterii EV, utilaje și multe altele, demonstrând adaptabilitatea și durabilitatea sa.
Viitorul CAN Bus
Privind spre viitor, protocolul CAN Bus va rămâne relevant, deși va fi influențat de tendințe majore:
- Nevoia de viteză: Cererea pentru rate de date mai mari ar putea impulsiona tranziția către CAN FD, CAN XL sau Ethernet Auto, pe măsură ce sistemele devin mai complexe și necesită mai multă lățime de bandă.
- Vehicule conectate: Creșterea cloud computing-ului și a telematicii vehiculelor ar putea permite, de exemplu, întreținerea predictivă și depanarea/actualizările la distanță, dar aduce și riscuri de securitate cibernetică sporite.
- Deschis vs. închis: O presiune către „Open Source” și „Dreptul la Reparație” s-ar putea confrunta cu o cerere din partea OEM-urilor de a păstra datele proprietare pentru a oferi, de exemplu, microservicii bazate pe abonament.
Este important de menționat că tranziția de la Classical CAN către CAN FD, CAN XL sau Ethernet Auto se va face în practică lent. Chiar dacă CAN FD a fost prezentat ca un succesor clar al Classical CAN în 2016, adoptarea sa pe scară largă în vehiculele de pe șosea rămâne limitată. Ethernetul Auto joacă un rol major în aplicații de cercetare și dezvoltare, dar nu a avut încă un impact semnificativ asupra dominanței Classical CAN în vehiculele aflate în circulație.
Stratul Fizic și de Legătură de Date CAN
Din punct de vedere tehnic, rețeaua de controler este descrisă de un strat de legătură de date și un strat fizic. Pentru CAN de viteză mare, ISO 11898-1 descrie stratul de legătură de date, în timp ce ISO 11898-2 descrie stratul fizic. În contextul unui model OSI cu 7 straturi, CAN reprezintă astfel cele două straturi inferioare.
Stratul Fizic (ISO 11898-2)
Stratul fizic CAN Bus definește tipurile de cabluri, nivelurile semnalelor electrice, cerințele nodurilor, impedanța cablului etc. De exemplu, stratul fizic specifică:
- Rata de Baud: Nodurile trebuie să fie conectate printr-o magistrală cu două fire, cu rate de baud de până la 1 Mbit/s (Classical CAN) sau 8 Mbit/s (CAN FD).
- Lungimea Cablului: Lungimile maxime ale cablului CAN ar trebui să fie între 500 de metri (la 125 kbit/s) și 40 de metri (la 1 Mbit/s), invers proporțional cu viteza de transmisie.
- Terminarea: Magistrala CAN trebuie terminată folosind un rezistor de terminare de 120 Ohmi la fiecare capăt al magistralei pentru a preveni reflexiile semnalului.
Stratul de Legătură de Date (ISO 11898-1)
Stratul de legătură de date CAN Bus definește, de exemplu, formatele cadrelor CAN, gestionarea erorilor, transmisia datelor și ajută la asigurarea integrității datelor. De exemplu, stratul de legătură de date specifică:
- Formatele Cadrelor: Există patru tipuri (cadre de date, cadre la distanță, cadre de eroare, cadre de suprasarcină) și identificatori de 11 biți/29 biți.
- Gestionarea Erorilor: Metode pentru detectarea și gestionarea erorilor CAN, inclusiv CRC (Cyclic Redundancy Check), sloturi de confirmare (ACK), contoare de erori și multe altele.
- Arbitrajul: Arbitrajul bit-wise non-distructiv ajută la gestionarea accesului la magistrala CAN și la evitarea coliziunilor prin prioritate bazată pe ID.
Ce este un Cadru CAN?
Conform stratului de legătură de date, comunicarea prin CAN Bus se realizează prin intermediul cadrelor CAN. Un cadru CAN este un pachet de date bine structurat, care conține informații specifice ce trebuie transmise între ECU-uri.
Mai jos este un cadru de date CAN standard cu identificator de 11 biți (CAN 2.0A), tipul utilizat în majoritatea mașinilor. Cadrul cu identificator extins de 29 de biți (CAN 2.0B) este identic, cu excepția ID-ului mai lung. Acesta este utilizat, de exemplu, în protocolul J1939 pentru vehicule grele.
Cele 8 câmpuri ale unui cadru de date CAN:
- SOF (Start of Frame): Un bit „dominant 0” care indică celorlalte noduri că un nod CAN intenționează să transmită.
- ID (Identifier): Identificatorul cadrului. Valorile mai mici au o prioritate mai mare în procesul de arbitraj.
- RTR (Remote Transmission Request): Indică dacă un nod trimite date sau solicită date dedicate de la un alt nod.
- Control: Conține bitul de extindere a identificatorului (IDE), care este un „dominant 0” pentru 11 biți. De asemenea, conține codul de lungime a datelor (DLC) de 4 biți, care specifică lungimea octeților de date care urmează să fie transmiși (de la 0 la 8 octeți).
- Data: Conține octeții de date, cunoscuți și sub denumirea de „payload”, care includ semnale CAN ce pot fi decodificate pentru a obține informații utile.
- CRC (Cyclic Redundancy Check): Utilizat pentru a asigura integritatea datelor transmise, detectând erorile.
- ACK (Acknowledgement): Slotul ACK indică dacă nodul a recunoscut și a primit corect datele.
- EOF (End of Frame): Marchează sfârșitul cadrului CAN.
Tipuri de Cadre CAN Bus
Există patru variante de cadre CAN:
- Cadru de Date: Așa cum am ilustrat mai sus, acesta transportă date de la un nod CAN expeditor către unul sau mai multe noduri receptoare. În practică, peste 99% din cazurile de utilizare se concentrează exclusiv pe cadrele de date CAN.
- Cadru de Eroare: Acesta este utilizat de un nod CAN pentru a indica detectarea unei erori de comunicare și conține un flag de eroare și un delimitator de eroare. Utilizatorii care se concentrează pe înregistrarea cadrelor de eroare CAN o fac, de exemplu, pentru a diagnostica problemele de comunicare ale ECU-urilor.
- Cadru la Distanță (Remote Frame): Acesta poate fi utilizat pentru a solicita anumite date de la un nod CAN și este similar cu un cadru de date, cu excepția faptului că îi lipsește câmpul Data și câmpul RTR este 1 (recessive). Cadrele la distanță sunt utilizate rar; majoritatea protocoalelor de nivel superior se bazează pe cadre de date CAN pentru a solicita informații atunci când este necesar (de exemplu, în OBD2/J1939).
- Cadru de Suprasarcină (Overload Frame): Acesta poate fi utilizat pentru a oferi o întârziere suplimentară între alte cadre CAN, dacă unele noduri CAN necesită timp suplimentar pentru procesare. În practică, cadrele de suprasarcină nu sunt aproape niciodată folosite.
Erori CAN Bus
Un cadru CAN trebuie să îndeplinească o serie de proprietăți pentru a fi valid. Dacă este transmis un cadru CAN eronat, nodurile CAN vor detecta automat acest lucru și vor acționa în consecință. Acest proces este denumit gestionarea erorilor CAN Bus, în care nodurile CAN își monitorizează propriile „contoare de erori CAN” și își schimbă starea (activ, pasiv, bus off) în funcție de aceste contoare. Capacitatea nodurilor CAN problematice de a transmite date este astfel redusă elegant pentru a evita erorile CAN suplimentare și blocarea magistralei. Acest mecanism avansat de detectare și corectare a erorilor contribuie semnificativ la robustețea și fiabilitatea sistemului CAN.
Protocoale CAN de Nivel Superior
CAN Bus, ca protocol de nivel inferior, oferă baza pentru comunicare, dar nu mult mai mult. De exemplu, standardul CAN nu specifică modul de gestionare a mesajelor mai mari de 8 octeți sau modul de decodificare a datelor brute. Prin urmare, există un set de protocoale de nivel superior care detaliază modul în care datele sunt comunicate între nodurile CAN dintr-o anumită rețea.
O analogie utilă este să ne gândim la comunicarea umană: în acest context, CAN Bus definește cerințele fizice (cum ar fi corzile vocale și capacitatea de a produce sunete) și blocurile de bază, cum ar fi literele din alfabet și gramatica. În comparație, protocoalele de nivel superior reflectă diferite limbi, cum ar fi germana sau engleza, folosind aceste elemente de bază pentru a construi cuvinte și propoziții semnificative.
- Întotdeauna un protocol de nivel superior: În aplicațiile practice, există întotdeauna un protocol de nivel superior în uz – altfel ar fi ca o conversație fără o limbă, adică sunete fără sens.
- Mii de protocoale: Ca și limbile, există mii de protocoale de nivel superior. Pe lângă cele comune, există și protocoale specifice producătorului sau aplicației, cunoscute sub numele de „protocoale personalizate”.
- Înregistrarea vs. înțelegerea datelor: Un înregistrator de sunet poate înregistra orice conversație umană, la fel cum un înregistrator de date CAN Bus poate înregistra orice comunicare bazată pe CAN. Dar pentru a interpreta informațiile într-un mod semnificativ, trebuie să înțelegeți limba, adică protocolul de nivel superior.
- Protocoale multiple: Mașina dumneavoastră utilizează un protocol de nivel superior bazat pe CAN pentru a-și comunica majoritatea datelor între ECU-uri – de obicei unul specific mașinii. Dar, pe lângă acest protocol CAN specific mașinii, aceasta poate comunica și pe aceeași magistrală CAN prin, de exemplu, OBD2 sau UDS, în scopul diagnosticării standardizate sau al testării emisiilor.
- Interoperabilitate: Utilizarea protocoalelor de nivel superior standardizate oferă interoperabilitate fundamentală între aplicații și dispozitive conexe – dacă înțelegeți limba (de exemplu, J1939), puteți utiliza aceste cunoștințe într-un număr mare de cazuri de utilizare.
Iată o prezentare generală a celor mai comune protocoale CAN auto/industriale:
| Protocol | Descriere și Domeniu de Aplicare |
|---|---|
| OBD2 | Sistem de diagnosticare la bord, utilizat în autoturisme și camioane pentru diagnosticare, întreținere și teste de emisii. Specifică coduri de eroare (DTC) și date în timp real (viteză, turație). |
| UDS (Unified Diagnostic Services) | Protocol de comunicare utilizat în ECU-urile auto pentru diagnosticare, actualizări de firmware și testare de rutină. |
| CCP/XCP (CAN Calibration Protocol / Universal Measurement and Calibration Protocol) | Permit accesul de citire/scriere la ECU pentru calibrare, măsurare și flash-uire. |
| CANopen | Utilizat pe scară largă în aplicații de control încorporate, inclusiv automatizări industriale, pentru a permite interoperabilitatea "plug-and-play" între nodurile CAN (dispozitive). |
| SAE J1939 | Utilizat în vehiculele grele (camioane, autobuze, utilaje agricole). Parametri precum "viteza" sunt identificați printr-un număr de parametru suspect (SPN), grupați după numere de grup de parametri (PGN). |
| NMEA 2000 | Utilizat în industria maritimă pentru conectarea motoarelor, instrumentelor și senzorilor pe bărci. Se bazează pe CAN și este strâns legat de J1939. |
| ISOBUS (ISO 11783) | Utilizat în mașinile agricole și forestiere. Permite integrarea "plug & play" între vehicule și implemente, indiferent de marcă. Este strâns legat de J1939. |
| ARINC | Protocolul "Aeronautical Radio, Incorporated" este utilizat frecvent în industria aerospațială. |
| UAVCAN | Protocol open source și ușor, adesea utilizat în drone, industria aerospațială și robotică. |
| DeviceNet | Utilizat în automatizări industriale și producție (senzori, actuatoare), în special în America de Nord. |
| SafetyBUS p | Utilizat în cazuri de utilizare de automatizare industrială critice pentru siguranță, de exemplu, producția de automobile și telecabine. |
| MilCAN | Proiectat pentru utilizare în vehicule militare și medii dure, oferind, de exemplu, transmisie deterministă a datelor. |
| HVAC CAN | Proiectat pentru utilizare în sistemele de încălzire, ventilație și aer condiționat (HVAC) în clădiri și vehicule. |
Cum să Înregistrați Date CAN Bus
Înregistrarea datelor CAN Bus este un proces esențial pentru diagnosticare, analiză și dezvoltare. Iată patru pași critici:
1. Selectați Hardware-ul Potrivit
Primul pas este să decideți cum doriți să colectați datele CAN:
- CAN-to-USB: Transmiterea datelor în timp real printr-o interfață CAN-USB este utilă pentru diagnosticare la fața locului și inginerie inversă.
- CAN-to-SD: Un înregistrator de date CAN Bus, cum ar fi CANedge1, poate captura probleme intermitente sau poate servi ca o cutie neagră pentru depanare sau litigii de garanție.
- CAN-to-Cloud: Înregistratoarele conectate, cum ar fi CANedge2/CANedge3, încarcă date pe serverul dumneavoastră pentru telemetică, întreținere predictivă și tablouri de bord.
2. Identificați Cablul Adaptor de Utilizat
Următorul pas este să determinați ce adaptor ar trebui utilizat. Acest lucru depinde de aplicație, dar iată 4 opțiuni comune:
- Adaptor OBD2: În majoritatea mașinilor (și unele autoutilitare/camioane), acesta vă permite să solicitați date OBD2/UDS. Poate oferi, de asemenea, acces la datele CAN proprietare ale mașinii.
- Adaptor J1939: În majoritatea vehiculelor grele (camioane, autobuze, excavatoare, tractoare), acesta oferă acces la datele CAN brute (protocolul J1939).
- Adaptor M12: În majoritatea navelor maritime (nave, bărci) și unele utilaje industriale, acesta vă permite să înregistrați datele CAN brute (NMEA 2000 sau CANopen).
- Fără contact: O opțiune universală este să săriți complet conectorul și să utilizați inducția pentru a citi date direct de la cablajul CAN High/Low. Aceasta este o metodă non-invazivă, preferată în implementări la scară largă pentru a evita problemele de garanție ale vehiculului. Cu toate acestea, necesită acces la cablaj și o sursă de alimentare externă, fiind, de asemenea, o soluție „doar de citire”.
Sfaturi pentru determinarea adaptorului potrivit:
- Mașini: Cel mai probabil veți avea nevoie de adaptorul OBD2 pentru a accesa date OBD2, UDS sau, uneori, date CAN proprietare. Dacă mașina dvs. este electrică (EV), puteți efectua cereri UDS prin OBD2. Dacă doriți să faceți inginerie inversă pentru date CAN proprietare și accesul nu este prin OBD2, veți avea nevoie de un cititor CAN fără contact.
- Vehicule grele: Adaptorul J1939 este cel mai comun. Căutați un conector Deutsch cu 9 pini, negru/verde. Multe mărci folosesc însă alți conectori (ex. Caterpillar), deci un cititor fără contact este util ca rezervă. Unele camioane permit accesul J1939 prin conectorul OBD2.
- Maritime: Cel mai adesea veți întâlni conectorul M12 pentru date NMEA 2000. Pentru date directe de la motor, pot fi folosiți și adaptoare J1939 sau DT06.
- Utilaje industriale: Frecvent se utilizează adaptorul M12 sau conectorul standard DB9 (asigurați-vă că este pentru acces CAN, nu RS232).
- Agricultură: De obicei, adaptorul J1939 pentru date J1939. Pentru date ISOBUS în paralel, un adaptor J1939-DB9/DB9 poate oferi acces la ambele rețele.
- Laboratoare și standuri de testare: Adaptoarele cu fire deschise sunt preferate pentru conexiuni rapide și crearea de cabluri personalizate.
Magistrale CAN Multiple
Majoritatea vehiculelor moderne nu au doar o singură magistrală CAN. Pot exista și alte protocoale auto, cum ar fi LIN bus, FlexRay și Ethernet Auto. Mai mult, multe vehicule (în special cele grele) vor avea mai multe magistrale CAN separate. De exemplu, majoritatea camioanelor comerciale au 2 sau 3 magistrale CAN separate, în timp ce unele vehicule miniere pot avea mai mult de 8 magistrale CAN separate. Acest lucru este important de reținut atunci când încercați să colectați date: este posibil să fie necesar să vă conectați la mai multe magistrale CAN în paralel pentru a colecta toate datele de care aveți nevoie – iar prima magistrală CAN pe care o identificați nu conține neapărat datele de care aveți nevoie. Multe înregistratoare CAN vă permit să înregistrați mai multe magistrale CAN în paralel. Acest lucru este important, deoarece, în general, trebuie să asigurați un grad ridicat de sincronizare a timpului pentru a putea efectua o analiză semnificativă pe diferite rețele.
3. Configurați și Conectați Dispozitivul
Înainte de a conecta dispozitivul, luați în considerare două aspecte:
- Rata de Baud: Rata de baud a dispozitivului dumneavoastră trebuie să corespundă cu cea a magistralei CAN. Dacă vă conectați la o magistrală CAN activă, unele dispozitive pot detecta automat rata de baud.
- Solicitări: Dacă doriți să înregistrați date la cerere, cum ar fi OBD2/UDS, trebuie să configurați dispozitivul să transmită mesajele de solicitare relevante.
Acum puteți conecta dispozitivul și verifica dacă înregistrează date. Dacă nu, consultați ghidurile de depanare specifice.
4. Revizuiți Datele CAN Brute
După ce ați terminat înregistrarea (de exemplu, o călătorie cu vehiculul), puteți examina fișierul jurnal rezultat. Un fișier jurnal cu date CAN brute (J1939), înregistrat într-un camion greu, va afișa datele într-o structură tabulară într-un instrument software precum asammdf. Fiecare linie reflectă un cadru CAN cu marcaj de timp, incluzând un ID CAN și un „payload” de date. Rețineți că datele CAN brute nu sunt lizibile de către oameni.
Cum să Decodificați Datele CAN Brute în „Valori Fizice”
Așa cum am menționat, datele CAN Bus brute nu sunt lizibile de către oameni. Pentru a le interpreta, trebuie să decodificați cadrele CAN în valori inginerești scalate, adică valori fizice (km/h, grade Celsius etc.). Acest lucru necesită un fișier DBC și un instrument software.
1. Înțelegeți Extracția Semnalului CAN
Fiecare cadru CAN conține semnale CAN în „payload”-ul de date. De exemplu, un mesaj CAN de la un modul de temperatură poate conține mai multe semnale CAN, inclusiv temperatura joncțiunii reci (CJTemp). Pentru a extrage valoarea fizică a unui semnal CAN, sunt necesare următoarele informații:
- Ordinea Octeților (Byte order): Dacă datele sunt codificate Intel (little-endian) sau Motorola (big-endian).
- Bitul de Start (Bit start): Bitul la care începe semnalul în cadrul.
- Lungimea Bitului (Bit length): Lungimea semnalului în biți.
- Offset: Valoarea cu care se deplasează valoarea semnalului.
- Scalare (Scale): Valoarea cu care se înmulțește valoarea semnalului.
Pentru a extrage un semnal CAN, se „decupează” biții relevanți, se ia valoarea zecimală și se efectuează o scalare liniară conform formulei (Valoare_semnal * Scalare) + Offset.
2. Obțineți Fișierul DBC Relevant
Interpretarea datelor CAN brute necesită informații despre modul în care sunt codificate semnalele CAN. Aici intervine fișierul DBC. Un fișier CAN DBC (bază de date CAN) este un fișier text care conține informații pentru decodificarea datelor CAN brute. În general, fișierele DBC sunt specifice aplicației și proprietare, fiind disponibile doar pentru Producătorul de Echipament Original (OEM). Dacă lucrați ca inginer OEM, veți avea, de obicei, deja fișierul DBC (sau informațiile pentru a-l crea).
3. Utilizați un Instrument Software/API
În cele din urmă, veți avea nevoie de un instrument software/API care să suporte formatul fișierului jurnal și fișierele DBC. Software-ul relevant depinde de cazul dumneavoastră de utilizare:
- asammdf GUI: Instrumentele desktop GUI sunt utile pentru analize ad-hoc, diagnosticare și export.
- Tablouri de bord Grafana: Tablourile de bord personalizate permit vizualizarea datelor, raportarea și partajarea de informații.
- MATLAB/Python: Instrumentele de scripting precum MATLAB/Python permit analiza statistică și procesarea datelor mari.
Cazuri de Utilizare pentru Înregistrarea Datelor CAN
Există mai multe cazuri de utilizare comune pentru înregistrarea datelor CAN Bus:
- Înregistrarea/transmiterea datelor de la mașini: Datele OBD2 de la mașini pot fi utilizate, de exemplu, pentru a reduce costurile cu combustibilul, a îmbunătăți stilul de condus, a testa piese prototip și pentru înregistrarea OBD2 în scopuri de asigurare.
- Telematică flotei de vehicule grele: Datele J1939 de la camioane, autobuze, tractoare etc. pot fi utilizate în gestionarea flotei pentru a reduce costurile sau a îmbunătăți siguranța.
- Întreținere predictivă: Vehiculele și utilajele pot fi monitorizate prin înregistratoare CAN IoT în cloud pentru a preîntâmpina și a evita defecțiunile.
- Cutie neagră pentru vehicule/mașini: Un înregistrator CAN poate servi ca o „cutie neagră” pentru vehicule sau echipamente, furnizând date pentru, de exemplu, dispute sau diagnosticare.
Întrebări Frecvente (FAQ)
- Ce este un ECU?
- O Unitate de Control Electronic (ECU) este o componentă care controlează o anumită funcționalitate într-un vehicul sau utilaj, cum ar fi motorul, transmisia sau frânele. Este alcătuită dintr-un microcontroler, un controler CAN și un transceiver CAN.
- De ce este CAN Bus atât de răspândit?
- CAN Bus este răspândit datorită simplității și costului său redus (reduce complexitatea cablajului și greutatea), accesului facil pentru diagnosticare, robusteții sale excepționale împotriva interferențelor și eficienței în prioritizarea mesajelor critice.
- Există un conector standard pentru CAN Bus?
- Nu există un conector standard universal. Cu toate acestea, conectorul DB9 (D-sub9) a devenit un standard de facto pentru multe aplicații de înregistrare și interfață CAN Bus.
- Ce este un cadru CAN?
- Un cadru CAN este unitatea fundamentală de comunicare pe magistrala CAN. Este un pachet de date structurat care conține, printre altele, un identificator (ID), date utile (payload), un câmp de verificare a erorilor (CRC) și un indicator de confirmare (ACK).
- De ce am nevoie de protocoale de nivel superior?
- CAN Bus oferă doar baza de comunicare. Protocoalele de nivel superior (ex. OBD2, J1939, CANopen) sunt necesare pentru a interpreta datele brute, a gestiona mesaje mai mari de 8 octeți și a oferi o structură semantică, transformând datele brute în informații semnificative (similar cu limbile umane peste sunete).
- Cum decodific datele CAN brute?
- Pentru a decodifica datele CAN brute în valori fizice lizibile (ex. km/h, grade), aveți nevoie de un fișier DBC (CAN database) și un instrument software. Fișierul DBC conține informații despre modul în care semnalele sunt codificate (ordine octeți, bit de start, lungime, offset, scalare).
Dacă vrei să descoperi și alte articole similare cu CAN Bus: Sistemul Nervos al Vehiculelor, poți vizita categoria Fitness.