28/02/2023
Într-o mașină modernă, comunicarea este cheia. De la sistemele complexe de motor și frânare, până la cele mai simple funcții precum reglarea oglinzilor sau deschiderea geamurilor, totul se bazează pe rețele de comunicație. Dintre acestea, una dintre cele mai discrete, dar esențiale, este magistrala LIN (Local Interconnect Network). Deși nu este la fel de faimoasă ca ruda sa mai rapidă, CAN (Controller Area Network), magistrala LIN joacă un rol vital în eficiența și costurile vehiculelor de astăzi. Dar ce face, mai exact, o magistrală LIN și de ce este atât de importantă?
- Ce Este Magistrala LIN? O Introducere în Rețeaua Simplă a Vehiculului
- Cum Funcționează Magistrala LIN: Arhitectură și Protocol
- Avantajele Magistralei LIN: De Ce Este Preferată în Anumite Aplicații?
- Dezavantajele Magistralei LIN: Limitele Protocolului
- Aplicații Tipice ale Magistralei LIN în Vehicule
- LIN vs. CAN: O Comparație Esențială
- Întrebări Frecvente Despre Magistrala LIN
- 1. Care este viteza maximă a magistralei LIN?
- 2. Câte dispozitive pot fi conectate la o singură magistrală LIN?
- 3. Este magistrala LIN utilizată și în afara industriei auto?
- 4. Ce se întâmplă dacă nodul master al unei magistrale LIN eșuează?
- 5. Poate magistrala LIN să înlocuiască magistrala CAN?
- 6. Cum contribuie LIN la eficiența energetică a vehiculului?
Ce Este Magistrala LIN? O Introducere în Rețeaua Simplă a Vehiculului
Magistrala LIN este un protocol de comunicație serială, dezvoltat în principal pentru aplicații auto, cu accent pe costuri reduse și simplitate. A apărut ca o soluție complementară la CAN, care este folosit pentru funcții critice și de mare viteză. LIN, pe de altă parte, este proiectată pentru a gestiona funcții non-critice, care necesită o lățime de bandă redusă și o implementare ieftină. Gândiți-vă la ea ca la o rețea locală de cartier pentru dispozitivele mai puțin exigente din mașina dumneavoastră.
Scopul principal al LIN este de a reduce complexitatea cablajului și costurile asociate în vehicule. Înainte de astfel de protocoale, fiecare componentă trebuia să aibă un cablu dedicat pentru fiecare semnal, ceea ce ducea la hamuri de cabluri voluminoase și grele. LIN permite mai multor dispozitive să comunice pe un singur fir, simplificând semnificativ arhitectura electrică a mașinii.
Cum Funcționează Magistrala LIN: Arhitectură și Protocol
Pentru a înțelege mai bine ce face LIN, trebuie să privim modul în care funcționează. Operațiunea sa se bazează pe o arhitectură master-slave, o caracteristică definitorie a acestui protocol.
Arhitectura Master-Slave
- Master: Există un singur nod master pe o magistrală LIN. Acest nod este responsabil pentru inițierea tuturor comunicațiilor și pentru menținerea sincronizării pe magistrală. El trimite cereri (header-uri) către nodurile slave și le dictează când și ce date să trimită.
- Slave-uri: Pot exista până la 16 noduri slave conectate la același master. Aceste noduri răspund doar atunci când sunt interogate de master sau când sunt instruite să trimită date specifice. Fiecare slave are un ID unic.
Acest model master-slave elimină necesitatea arbitrajului complex al magistralei, simplificând protocolul și reducând costurile. Masterul controlează fluxul de date, prevenind coliziunile și asigurând că fiecare dispozitiv primește timpul său de transmisie.
Comunicarea pe un Singur Fir
Unul dintre cele cele mai mari avantaje ale LIN este utilizarea unui singur fir pentru transmisia datelor, pe lângă firul de alimentare și cel de masă. Acest fir este de obicei neecranat, contribuind la reducerea și mai mare a costurilor și a greutății cablajului. Rata de transfer a datelor este relativ mică, de obicei până la 20 kbps (kilobiți pe secundă), ceea ce este suficient pentru aplicațiile pentru care este destinat LIN.
Structura Cadrelor de Date
Comunicarea pe LIN este bazată pe cadre (frames), fiecare cadru având o structură specifică:
- Break Field: Un semnal lung de "break" (stare dominantă) trimis de master, care semnalează începutul unui nou cadru și resetează sincronizarea slave-urilor.
- Sync Field: Un byte de sincronizare (0x55) trimis de master, care permite slave-urilor să-și ajusteze ceasurile interne pentru a se sincroniza cu masterul. Acest lucru elimină necesitatea unui oscilator de înaltă precizie în fiecare slave, reducând și mai mult costurile.
- Identifier Field: Un byte care conține un identificator de 6 biți și 2 biți de paritate. Acest identificator specifică tipul de mesaj care urmează și, prin urmare, indică ce nod slave trebuie să răspundă (sau să asculte).
- Data Field: Acesta este locul unde se află informația utilă. Poate conține 1, 2, 4 sau 8 octeți de date, în funcție de configurația specifică a mesajului.
- Checksum Field: Un byte de verificare a sumei de control, folosit pentru detectarea erorilor. Asigură integritatea datelor transmise. Există două tipuri de sume de control în LIN: clasică (pentru versiunile LIN 1.3) și îmbunătățită (pentru LIN 2.0 și ulterioare), care include și byte-ul de identificare în calcul.
Masterul inițiază întotdeauna comunicarea prin trimiterea Break-ului, Sync-ului și Identifier-ului. Apoi, în funcție de Identifier, fie masterul trimite datele, fie unul dintre slave-uri răspunde cu datele sale. Acest proces este strict controlat de master printr-un "tabel de programare" predefinit.
Avantajele Magistralei LIN: De Ce Este Preferată în Anumite Aplicații?
Deși nu este la fel de puternică ca alte protocoale, LIN are o serie de avantaje semnificative care o fac ideală pentru anumite scenarii în industria auto:
- Costuri Reduse: Acesta este cel mai mare avantaj. Utilizarea unui singur fir neecranat, transmițătoare/receptoare simple și microcontrolere mai puțin puternice în nodurile slave reduc drastic costurile de implementare per nod.
- Simplitate: Protocolul este relativ simplu de înțeles și de implementat. Debugging-ul este, de asemenea, mai ușor datorită naturii master-slave și a ratei scăzute de date.
- Reducerea Cablajului și Greutății: Prin consolidarea mai multor semnale pe un singur fir, LIN contribuie la reducerea semnificativă a numărului de cabluri și, implicit, a greutății totale a hamului de cabluri dintr-un vehicul. Acest lucru are implicații pozitive asupra consumului de combustibil și a costurilor de fabricație.
- Robustețe Suficientă: Pentru aplicațiile pentru care este proiectată (controlul luminilor, geamurilor, oglinzilor), robustețea și viteza oferite de LIN sunt perfect adecvate. Nu este nevoie de o lățime de bandă sau o fiabilitate de nivel militar pentru a ridica un geam.
- Gestionarea Puterii (Sleep Mode): Nodurile LIN pot intra în mod de repaus (sleep mode) pentru a economisi energie atunci când nu sunt active, iar masterul le poate "trezi" atunci când este necesară comunicarea.
Dezavantajele Magistralei LIN: Limitele Protocolului
Niciun protocol nu este perfect, iar LIN are și dezavantajele sale, care îl fac inadecvat pentru anumite tipuri de aplicații:
- Viteză Redusă: Cu o viteză maximă de 20 kbps, LIN este mult mai lent decât CAN (care poate ajunge la 1 Mbps) sau Ethernet (mult mai rapid). Acest lucru îl limitează la aplicații unde întârzierea datelor nu este critică.
- Număr Limitat de Noduri: O singură magistrală LIN poate suporta maxim 16 noduri slave. Pentru sisteme mai complexe, sunt necesare mai multe magistrale LIN sau alte protocoale.
- Dependența de Master: Întreaga comunicație depinde de nodul master. Dacă masterul eșuează, întreaga magistrală LIN devine inoperabilă. Nu există un mecanism de arbitraj peer-to-peer.
- Fără Arbitraj: Spre deosebire de CAN, unde nodurile pot iniția transmisii și pot concura pentru accesul la magistrală printr-un proces de arbitraj non-distructiv, LIN este strict controlat de master. Aceasta simplifică designul, dar reduce flexibilitatea.
- Distanță Limitată: Datorită ratei scăzute și a utilizării unui singur fir, distanța maximă pe care o poate acoperi o magistrală LIN este, de asemenea, limitată, de obicei la câțiva metri.
Aplicații Tipice ale Magistralei LIN în Vehicule
Datorită avantajelor sale în ceea ce privește costul și simplitatea, LIN este omniprezentă în sistemele non-critice ale vehiculelor moderne. Iată câteva exemple comune:
- Sisteme de Confort și Caroserie:
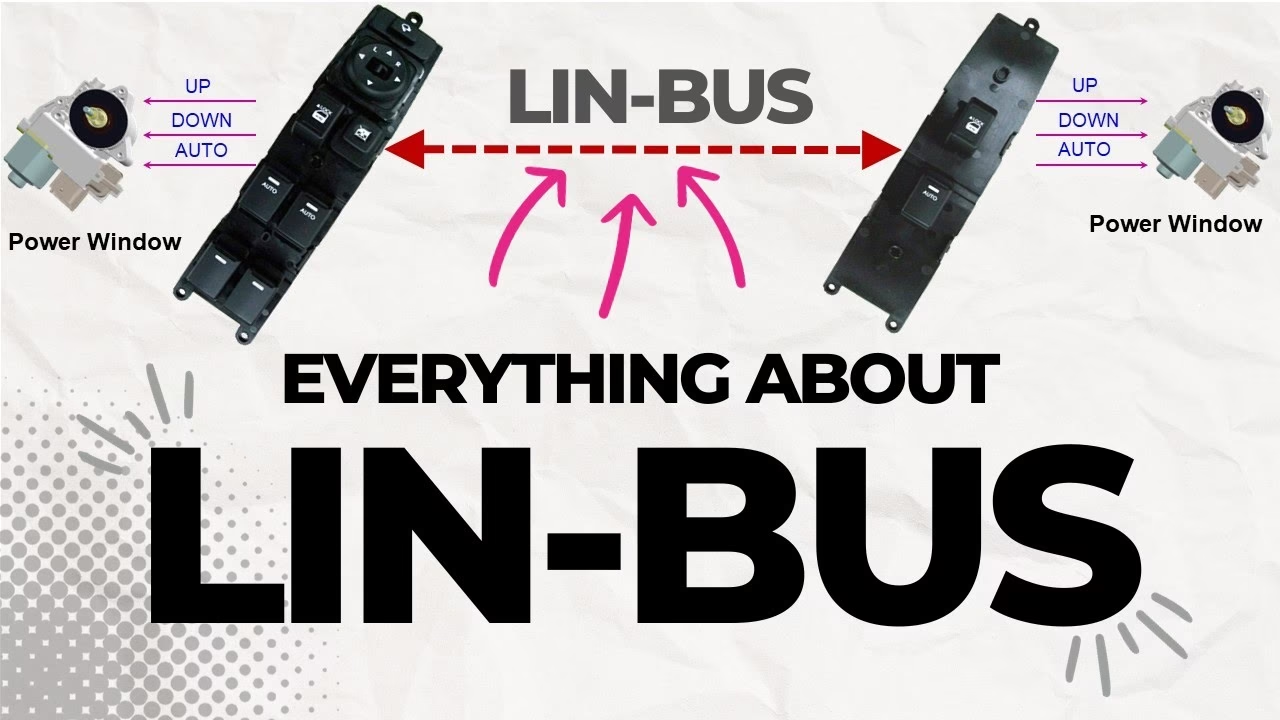
- Geamuri Electrice: Controlul motoarelor geamurilor și citirea poziției acestora.
- Oglinzi Laterale: Reglarea poziției și plierea oglinzilor.
- Scaune: Ajustarea poziției scaunelor, încălzire scaune.
- Sisteme de Iluminat: Controlul farurilor (doar anumite funcții), luminilor interioare, luminilor de bord.
- Încuietori Centrale: Blocarea/deblocarea ușilor.
- Trapa: Deschiderea și închiderea trapei.
- Sisteme de Climatizare: Controlul ventilatoarelor, senzorilor de temperatură, actuatoarelor de aer condiționat.
- Senzori Simpli: Citirea datelor de la senzori simpli (ex: senzor de ploaie, senzor de lumină, senzor de nivel de lichid de parbriz).
- Module de Control Uși: Un modul master într-o ușă poate gestiona mai multe slave-uri (geam, oglindă, încuietoare) pe o singură magistrală LIN.
Practic, oriunde nu este necesară o comunicare de mare viteză sau o fiabilitate extremă (cum ar fi sistemele de frânare sau direcție), LIN este o alegere excelentă pentru a reduce costurile și complexitatea cablajului.
LIN vs. CAN: O Comparație Esențială
Deoarece LIN este adesea menționată în contextul CAN, este util să înțelegem diferențele fundamentale dintre aceste două protocoale auto majore:
| Caracteristică | Magistrala LIN | Magistrala CAN |
|---|---|---|
| Scop Principal | Aplicații de cost redus, non-critice, lățime de bandă mică. | Aplicații critice, de mare viteză, control în timp real. |
| Viteză Max. | 20 kbps | 1 Mbps (CAN FD mult mai mult) |
| Arhitectură | Master/Slave (un master, până la 16 slave-uri) | Multi-Master (toate nodurile pot iniția comunicarea) |
| Cabluri | Un singur fir de date (neecranat) | Două fire de date (pereche torsadată, de obicei ecranată) |
| Cost Per Nod | Foarte scăzut | Mai ridicat |
| Arbitraj | Nu există; masterul controlează programarea. | Bazat pe ID-ul mesajului (arbitraj non-distructiv). |
| Fiabilitate | Suficientă pentru aplicații non-critice. | Foarte înaltă, cu mecanisme robuste de detectare a erorilor. |
| Exemple Aplicații | Geamuri, oglinzi, lumini interioare, scaune, senzori simpli. | Motor, transmisie, ABS, ESP, airbag-uri, sisteme de infotainment. |
În esență, LIN și CAN nu sunt concurenți, ci parteneri. Ele coexistă în același vehicul, fiecare îndeplinind rolul pentru care este cel mai potrivit. CAN gestionează "creierul" și "inima" mașinii, în timp ce LIN se ocupă de "membrele" și "simțurile" auxiliare, asigurând că totul funcționează armonios și eficient din punct de vedere al costurilor.
Întrebări Frecvente Despre Magistrala LIN
1. Care este viteza maximă a magistralei LIN?
Viteza maximă teoretică a magistralei LIN este de 20 kilobiți pe secundă (kbps). În practică, vitezele comune sunt de 9.6 kbps sau 19.2 kbps, fiind suficient de rapide pentru aplicațiile de control al componentelor non-critice, unde întârzierile de ordinul milisecundelor sunt acceptabile.
2. Câte dispozitive pot fi conectate la o singură magistrală LIN?
O singură magistrală LIN poate suporta un nod master și până la 16 noduri slave. Această limitare este dată de structura protocolului și de necesitatea ca fiecare slave să aibă un identificator unic.
3. Este magistrala LIN utilizată și în afara industriei auto?
Deși nu este exclusiv, magistrala LIN a fost proiectată și optimizată aproape în totalitate pentru aplicațiile auto. Prin urmare, este rar întâlnită în alte industrii. În aplicații industriale sau de automatizări, protocoale precum Modbus, Ethernet/IP sau CAN sunt mult mai răspândite.
4. Ce se întâmplă dacă nodul master al unei magistrale LIN eșuează?
Dacă nodul master al unei magistrale LIN eșuează, întreaga magistrală devine inoperabilă. Nodurile slave nu pot iniția comunicarea și depind complet de master pentru a primi comenzi sau pentru a transmite date. Acesta este unul dintre principalele dezavantaje ale arhitecturii master-slave în contextul fiabilității sistemului.
5. Poate magistrala LIN să înlocuiască magistrala CAN?
Nu, magistrala LIN nu poate înlocui magistrala CAN. Ele sunt complementare și servesc scopuri diferite. CAN este proiectată pentru comunicații de mare viteză și fiabilitate ridicată, esențiale pentru funcțiile critice de siguranță și performanță ale vehiculului (motor, frâne, airbag-uri). LIN este optimizată pentru costuri reduse și sarcini simple, unde viteza și fiabilitatea extremă nu sunt necesare. Fiecare protocol excelează în nișa sa, iar împreună formează o rețea eficientă în vehiculele moderne.
6. Cum contribuie LIN la eficiența energetică a vehiculului?
LIN contribuie la eficiența energetică prin permiterea nodurilor slave să intre într-un mod de repaus (sleep mode) cu consum redus de energie atunci când nu sunt active. Masterul poate "trezi" slave-urile prin trimiterea unui semnal de "wake-up" pe magistrală. De asemenea, reducerea greutății cablajului prin utilizarea unui singur fir contribuie indirect la o eficiență mai bună a combustibilului sau la o autonomie crescută pentru vehiculele electrice.
În concluzie, magistrala LIN, deși adesea trecută cu vederea în comparație cu protocoalele mai "glamouroase", este o componentă fundamentală a arhitecturii electronice a vehiculelor moderne. Prin simplitatea, costul redus și eficiența sa, permite integrarea a numeroase funcții de confort și control, contribuind semnificativ la experiența generală de utilizare a mașinii. Este un exemplu perfect de tehnologie adaptată nevoilor specifice, demonstrând că nu întotdeauna cea mai complexă sau rapidă soluție este și cea mai bună, ci cea mai adecvată și eficientă pentru sarcina sa.
Dacă vrei să descoperi și alte articole similare cu Ce Face o Magistrală LIN în Mașina Ta?, poți vizita categoria Fitness.