13/04/2023
Imaginați-vă că ați construit propriul robot. E minunat, nu-i așa? Dar acum vreți să-l faceți să recunoască și să ridice o minge. Vă gândiți: 'Cum naiba fac asta?' Ei bine, OpenCV și detectarea obiectelor vă vin în ajutor. Această tehnologie este esențială pentru ca mașinile să poată interacționa inteligent cu mediul înconjurător, identificând și localizând obiecte specifice în imagini sau fluxuri video. Înainte de a ne scufunda în detaliile tehnice, haideți să înțelegem cu ce avem de-a face și de ce OpenCV este instrumentul perfect pentru această sarcină complexă.
- Ce este OpenCV și Detectarea Obiectelor?
- Metode Tradiționale: Clasificatoarele Haar Cascade
- Progrese cu Învățarea Profundă: Detectarea Obiectelor cu Rețele Neuronale
- Pregătirea Datelor și Antrenarea Modelelor Personalizate
- Aplicații Reale ale Detectării Obiectelor cu OpenCV
- Comparație: Haar Cascades vs. Învățare Profundă pentru Detectarea Obiectelor
- Sfaturi pentru o Detectare Îmbunătățită a Obiectelor
- Întrebări Frecvente (FAQ) despre Detectarea Obiectelor cu OpenCV
- Concluzie
Ce este OpenCV și Detectarea Obiectelor?
OpenCV, sau Open Source Computer Vision Library, este o bibliotecă open-source extrem de puternică, dedicată rezolvării problemelor de viziune artificială. Dezvoltată inițial de Intel, această bibliotecă este plină de funcții și algoritmi care permit analiza, manipularea și înțelegerea datelor vizuale, făcând-o o alegere de top pentru orice aplicație de procesare a imaginilor sau a fluxurilor video.
Detectarea obiectelor este procesul prin care se identifică și se localizează instanțe ale unor clase specifice de obiecte (de exemplu, oameni, mașini, animale) în imagini sau videoclipuri. Este ca și cum ați oferi unei mașini capacitatea de a 'vedea' și 'înțelege' ce se află în jurul ei, la fel cum o face ochiul uman. Această tehnologie este omniprezentă în viața de zi cu zi, de la filtrele de pe rețelele sociale la sistemele avansate de asistență a șoferului din mașinile autonome.
Când combinați OpenCV cu detectarea obiectelor, obțineți o potrivire perfectă. OpenCV vă oferă flexibilitatea de a implementa și ajusta algoritmii, făcând detectarea obiectelor mai precisă și mai robustă pentru nevoile specifice ale proiectului dumneavoastră. Este ca și cum ați oferi aplicației dumneavoastră o pereche de ochelari cu raze X, permițându-i să identifice cu exactitate ce o interesează.
Metode Tradiționale: Clasificatoarele Haar Cascade
La baza multor sisteme clasice de detectare a obiectelor cu OpenCV stă algoritmul Viola-Jones, propus de Paul Viola și Michael Jones. Acesta este un cadru de detectare a obiectelor bazat pe învățarea automată, capabil de detecție în timp real. Principalul său instrument este utilizarea așa-numitelor caracteristici Haar.
Caracteristicile Haar sunt esențial, modele rectangulare simple, care măsoară diferența de intensitate a pixelilor între regiuni adiacente, luminoase și întunecate, dintr-o imagine. De exemplu, o caracteristică Haar poate detecta o muchie prin compararea intensității pixelilor dintr-o zonă albă cu cea dintr-o zonă neagră alăturată. Valoarea unei caracteristici se calculează ca diferența dintre suma intensității pixelilor dintr-o regiune luminoasă și suma intensității pixelilor dintr-o regiune întunecată. Pentru a accelera calculul acestor caracteristici, algoritmul folosește conceptul de imagini integrale, care permit calcularea sumei pixelilor într-o regiune rectangulară într-un timp constant, indiferent de dimensiunea regiunii.
Pentru a antrena un clasificator Haar Cascade, sunt necesare două tipuri de imagini:
- Imagini pozitive: Acestea sunt imagini care conțin obiectul de detectat (de exemplu, un semn de stop sau o față umană).
- Imagini negative: Acestea sunt imagini care nu conțin obiectul și sunt folosite pentru a învăța clasificatorul ce să ignore.
Ideea cheie este de a detecta obiecte la multiple scări și locații în imagine, folosind o cascadă de clasificatori. O cascadă este o serie de clasificatori mai simpli, aranjați în trepte. La fiecare treaptă, un clasificator elimină rapid regiunile din imagine care, evident, nu conțin obiectul. Doar regiunile care 'supraviețuiesc' tuturor treptelor cascadei sunt considerate ca potențiale detecții ale obiectului, ceea ce crește semnificativ viteza de procesare.
Implementarea detectării cu Haar Cascades
Implementarea detectării obiectelor cu Haar Cascades în OpenCV implică câțiva pași simpli, de obicei într-un script Python:
- Încărcarea imaginii: Se utilizează
cv2.imread()pentru a citi imaginea în care doriți să detectați obiecte. - Conversia formatelor de culoare:OpenCV citește imaginile în format BGR. Pentru vizualizare sau pentru procesare, acestea pot fi convertite în RGB sau, cel mai important pentru detectare, în format grayscale folosind
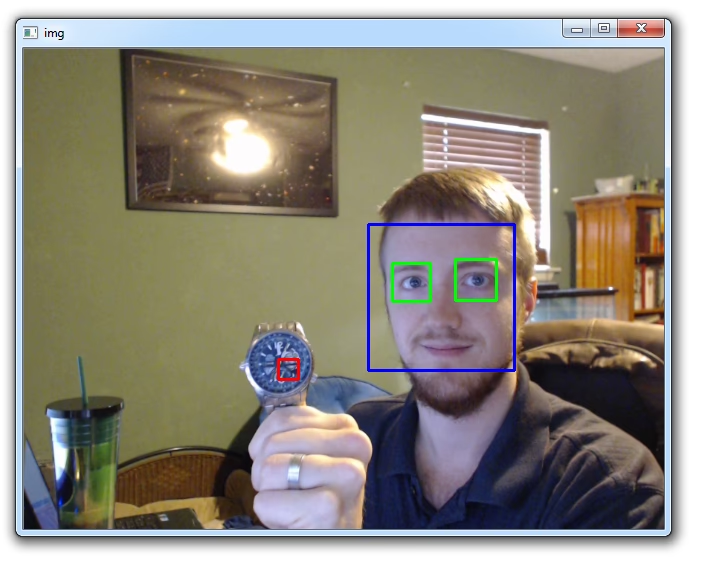
cv2.cvtColor(). Detectarea cu Haar Cascades funcționează optim pe imagini alb-negru. - Încărcarea clasificatorului Haar Cascade: Se încarcă fișierul XML pre-antrenat al clasificatorului (de exemplu,
haarcascade_frontalface_default.xmlpentru fețe) folosindcv2.CascadeClassifier(). - Detectarea obiectelor: Funcția cheie este
detectMultiScale(). Aceasta scanează imaginea la multiple scări pentru a detecta obiecte de diferite dimensiuni. Parametrii săi sunt cruciali: minSize=(20, 20): Definește dimensiunea minimă a obiectului de detectat. Obiectele mai mici decât această dimensiune sunt ignorate.scaleFactor=1.1: Specifică cu cât se reduce imaginea la fiecare scară. O valoare de 1.1 înseamnă o reducere de 10%. O valoare mai mică crește precizia, dar încetinește procesarea.minNeighbors=3: Specifică câți 'vecini' (detecții suprapuse) trebuie să aibă un dreptunghi candidat pentru a fi considerat o detecție validă. O valoare mai mare reduce falsele pozitive, dar poate rata unele detecții reale.- Desenarea dreptunghiurilor: Odată detectate,
cv2.rectangle()este utilizată pentru a desena dreptunghiuri de delimitare în jurul obiectelor identificate, vizualizând rezultatul pe imaginea originală color.
Progrese cu Învățarea Profundă: Detectarea Obiectelor cu Rețele Neuronale
Deși clasificatorii Haar Cascade sunt rapizi și eficienți pentru detectarea în timp real, în special pentru obiecte cu trăsături vizuale bine definite, precum fețe sau semne de circulație, învățarea profundă (Deep Learning) a revoluționat acuratețea și robustetea detectării obiectelor. Aceasta utilizează rețele neuronale profunde pentru a modela tipare și relații complexe în seturi mari de date, depășind adesea limitările metodelor tradiționale în scenarii complexe sau aglomerate.
Principalele metode de detectare a obiectelor bazate pe învățare profundă se împart în două categorii:
- Bazate pe propuneri de regiuni (Region Proposal based): Cum ar fi Faster R-CNNs. Acestea generează mai întâi propuneri de regiuni unde ar putea exista obiecte, apoi clasifică și rafinează fiecare propunere. Sunt foarte precise, dar pot fi lente și complexe.
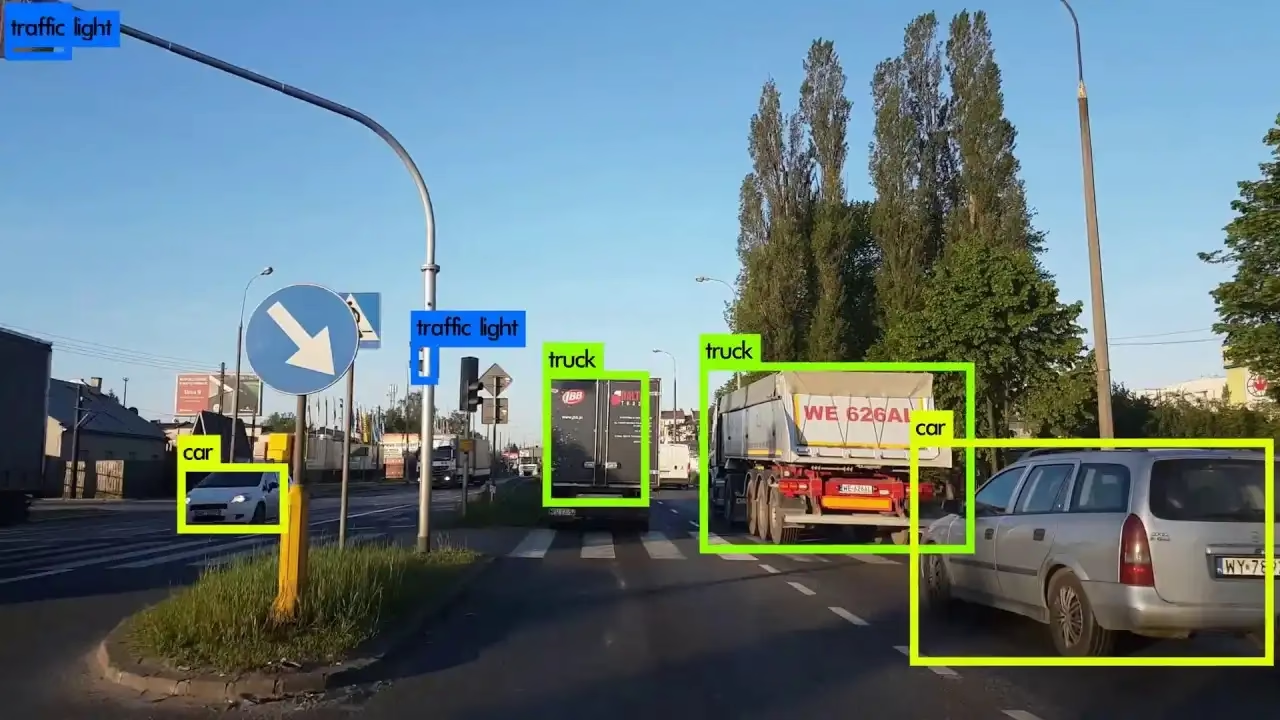
- Detectoare cu o singură trecere (Single Shot Detectors - SSD): Cum ar fi YOLO (You Only Look Once) și SSD. Acestea detectează și clasifică obiectele într-o singură trecere prin rețea, făcându-le mult mai rapide și potrivite pentru detectarea în timp real. YOLO este recunoscut pentru viteza sa excepțională, în timp ce SSD oferă un echilibru excelent între viteză și precizie, fiind adesea preferat pentru aplicații pe dispozitive cu resurse limitate.
OpenCV, prin modulul său dnn (Deep Neural Network), permite integrarea și rularea modelelor de învățare profundă pre-antrenate. Un exemplu popular și eficient este combinarea arhitecturii MobileNet cu cadrul SSD. MobileNet-urile sunt rețele neuronale eficiente, concepute special pentru dispozitive cu resurse limitate (cum ar fi smartphone-uri sau Raspberry Pi). Ele se bazează pe conceptul de convoluții separabile în profunzime, care reduc semnificativ numărul de parametri și operații computaționale, fără un sacrificiu major de precizie. Această combinație (MobileNet + SSD) oferă o soluție rapidă și eficientă pentru detectarea obiectelor, capabilă să identifice o gamă largă de obiecte (mașini, persoane, animale, etc.) cu o precizie remarcabilă, chiar și pe hardware modest.
Pentru a utiliza aceste modele de învățare profundă în OpenCV, procesul este similar cu cel al Haar Cascades, dar cu instrumente specifice modulului dnn:
- Încărcarea modelului: Se încarcă modelul serializat (de obicei fișiere
.prototxtpentru arhitectură și.caffemodel,.pbsau.onnxpentru ponderi) folosindcv2.dnn.readNetFromCaffe()sau funcții similare. - Pregătirea imaginii de intrare: Imaginea este preprocesată într-un 'blob' (o structură de date specifică rețelei neuronale, care include redimensionare și normalizare) folosind
cv2.dnn.blobFromImage(). - Propagarea înainte: Acest 'blob' este transmis prin rețea (
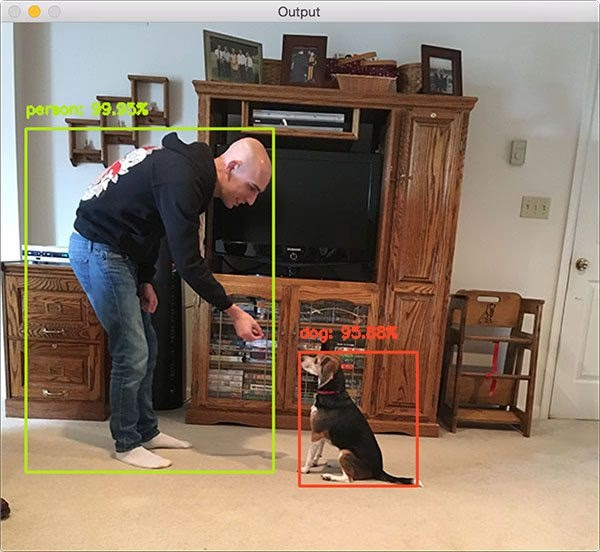
net.setInput(blob)urmat denet.forward()) pentru a obține detecțiile și predicțiile. - Procesarea rezultatelor: Rezultatele includ coordonatele casetelor de delimitare (x, y, lățime, înălțime) și scorurile de încredere pentru fiecare obiect detectat. Se aplică un prag minim de încredere (
confidence) pentru a filtra detecțiile slabe. - Vizualizarea: Dreptunghiuri și etichete sunt desenate pe imaginea originală pentru a arăta obiectele detectate.
Pregătirea Datelor și Antrenarea Modelelor Personalizate
Indiferent dacă folosiți clasificatori Haar Cascades sau modele de învățare profundă, calitatea și cantitatea datelor de antrenament sunt absolut cruciale pentru succesul sistemului de detectare. Un model este la fel de bun ca datele pe care a fost antrenat.
Seturi de imagini pozitive și negative
Pentru a antrena propriul clasificator personalizat, aveți nevoie de două seturi de imagini:
- Imagini pozitive: Acestea sunt fotografii care conțin obiectul pe care doriți să-l detectați. Este esențial să aveți o mare diversitate: obiectul fotografiat din unghiuri diferite, în condiții de iluminare variate, cu fundaluri diverse și la scări diferite. Puteți face propriile fotografii sau puteți căuta imagini pe internet. Pentru imagini de pe internet, asigurați-vă că au o rezoluție decentă (de exemplu, 256x256 pixeli este un bun punct de plecare) și că obiectul este clar vizibil.
- Imagini negative: Acestea sunt imagini care NU conțin obiectul țintă. Ele sunt la fel de importante ca imaginile pozitive, deoarece învață clasificatorul ce să ignore. Ideal ar fi ca imaginile negative să provină dintr-un mediu similar cu cel în care va fi utilizat clasificatorul. Puteți genera mii de imagini negative extrăgând cadre din videoclipuri care nu conțin obiectul dorit, folosind instrumente precum
ffmpeg. Asigurați-vă că cadrele extrase sunt suficient de diferite pentru a oferi varietate.
Crearea fișierelor de adnotare și a eșantioanelor pozitive
Un instrument extrem de util din OpenCV este opencv_annotation. Acesta vă ajută să creați rapid fișiere de adnotare care specifică calea către imaginile pozitive și locația (coordonatele x, y) și dimensiunea (lățimea, înălțimea) obiectelor în cadrul acestor imagini. Procesul este interactiv: desenați manual dreptunghiuri de delimitare în jurul fiecărui obiect din fiecare imagine. Fără acest fișier de adnotare precis, antrenamentul este aproape imposibil.
După adnotare, opencv_createsamples este folosit pentru a genera fișierul .vec, care conține eșantioanele pozitive într-un format binar, optimizat pentru antrenament. Acest instrument poate, de asemenea, să genereze versiuni distorsionate ale obiectelor (rotite, scalate) pentru a mări setul de date și a îmbunătăți robustețea clasificatorului. Este important să rețineți parametrul -num, care specifică numărul de eșantioane de generat. De obicei, se recomandă să generați mai multe eșantioane decât aveți imagini pozitive reale.
Antrenarea clasificatorului cu opencv_traincascade
Procesul de antrenare propriu-zis se realizează cu opencv_traincascade. Acesta este un proces intensiv din punct de vedere computațional și poate dura ore, zile sau chiar săptămâni, în funcție de dimensiunea seturilor de date, complexitatea obiectului și resursele hardware disponibile. Din acest motiv, este puternic recomandat să se utilizeze servere dedicate (cum ar fi cele de la Digital Ocean sau AWS) pentru antrenament, mai ales dacă doriți să obțineți rezultate rapide și să nu blocați mașina locală.
Câțiva parametri cheie pentru opencv_traincascade includ:
-featureType: Puteți alege între HAAR (mai lent, dar uneori mai precis) și LBP (Local Binary Patterns, mai rapid și adesea suficient de precis).-wși-h: Specifică lățimea și înălțimea ferestrei de detectare. Acestea ar trebui să fie cel puțin dimensiunea minimă la care doriți să detectați obiectul.-numPos: Numărul de eșantioane pozitive utilizate la fiecare etapă de antrenament. Este o greșeală comună să setați acest parametru la numărul total de eșantioane pozitive. În realitate, ar trebui să fie o valoare mai mică, de obicei 85% din numărul total de eșantioane din fișierul.vec, deoarece unele eșantioane pot fi 'aruncate' de algoritm.-numNeg: Numărul de eșantioane negative. Ar trebui să fie mult mai mare decât numărul de pozitive (un raport de 10:1 sau mai mult este comun).-acceptanceRatioBreakValue: Un prag la care antrenamentul se oprește dacă rata de false pozitive atinge o valoare suficient de mică (de exemplu, 0.00001 sau 10e-5).-data: Directorul unde va fi stocat fișierulcascade.xmlfinal și alte fișiere intermediare.-vec: Calea către fișierul.vecgenerat deopencv_createsamples.-bg: Calea către un fișier text care listează căile către toate imaginile negative.
Depanarea erorilor comune de antrenament
Antrenarea unui clasificator poate fi frustrantă din cauza erorilor. Iată câteva comune:
- "Required leaf false alarm rate achieved. Branch training terminated": Aceasta înseamnă că algoritmul nu mai poate îmbunătăți clasificatorul cu datele curente. Soluția este să adăugați mai multe imagini pozitive și negative, mai diverse. Dacă se întâmplă la o etapă târzie și sunteți mulțumit, puteți opri manual antrenamentul și utiliza clasificatorul parțial.
- "Train dataset for temp stage can not be filled. Branch training terminated.": Cel mai adesea, acest mesaj indică o lipsă de imagini pozitive. Adăugați mai multe!
Este important să experimentați cu dimensiunile imaginilor și parametrii. Deși unii experți recomandă imagini mici (ex: 80x80 pixeli) pentru viteză, uneori pierderea de informație vizuală poate duce la false pozitive. Folosirea unor instrumente precum ImageMagick (mogrify) poate ajuta la redimensionarea eficientă a imaginilor.
Aplicații Reale ale Detectării Obiectelor cu OpenCV
Versatilitatea OpenCV în detectarea obiectelor îl face indispensabil într-o multitudine de domenii, de la securitate la robotică și divertisment:
- Recunoaștere facială: De la deblocarea smartphone-urilor la etichetarea prietenilor pe rețelele sociale, OpenCV a fost în prima linie pentru a face recunoașterea facială o realitate accesibilă.
- Detectarea plăcuțelor de înmatriculare: Utilizată în sisteme de monitorizare a traficului, parcări automate și de aplicare a legii, contribuind la menținerea ordinii și legii pe șosele.
- Numărarea mulțimilor: Crucială la concerte, evenimente sportive sau proteste, unde estimarea și monitorizarea numărului de persoane prezente este vitală pentru siguranță și gestionarea evenimentelor.
- Sisteme de asistență pentru șofer (ADAS): Detectarea pietonilor, bicicliștilor, altor vehicule și semnelor de circulație pentru o conducere mai sigură și asistență la parcare.
- Robotică: Permite roboților să interacționeze inteligent cu mediul înconjurător prin identificarea și manipularea obiectelor, fie că este vorba de un robot de depozit sau de un braț robotic în producție.
- Supraveghere video: Detectarea mișcării, intrușilor sau a comportamentelor suspecte în timp real.
Comparație: Haar Cascades vs. Învățare Profundă pentru Detectarea Obiectelor
| Caracteristică | Haar Cascades (Tradițional) | Învățare Profundă (YOLO, SSD) |
|---|---|---|
| Acumulate (precizie) | Bună pentru obiecte specifice (fețe), dar limitată în scenarii complexe și cu ocluzii. | Excelentă, robustă în diverse scenarii, inclusiv cele aglomerate, cu ocluzii sau condiții de iluminare dificile. |
| Viteză | Rapidă, potrivită pentru detectare în timp real pe CPU, mai ales cu o cascadă bine antrenată. | Foarte rapidă (mai ales YOLO, SSD), ideală pentru timp real, dar beneficiază semnificativ de GPU. |
| Complexitate Antrenament | Necesită seturi de date pozitive și negative bine definite, antrenament specific și timp considerabil. | Necesită seturi de date mari și diverse, putere de calcul considerabilă pentru antrenare de la zero; se folosesc adesea modele pre-antrenate și transfer learning. |
| Generalizare | Mai puțin generalizabil la noi obiecte, unghiuri sau condiții de iluminare. | Mai bună generalizare, capabilă să detecteze o gamă largă de obiecte și să se adapteze la variații. |
| Resurse Necesare (Inferență) | Mai puține resurse, potrivit pentru dispozitive cu putere mică și sisteme embedded. | Necesită mai multe resurse, dar arhitecturi precum MobileNet/SSD sunt optimizate pentru dispozitive mobile și IoT. |
Sfaturi pentru o Detectare Îmbunătățită a Obiectelor
Pentru a obține cele mai bune rezultate în proiectele dumneavoastră de detectare a obiectelor cu OpenCV, luați în considerare următoarele sfaturi:
- Augmentarea datelor: Creați date noi din cele existente prin aplicarea de transformări (rotații, răsturnări, zoom-uri, modificări de luminozitate). Această tehnică crește artificial dimensiunea și diversitatea setului de antrenament, ceea ce duce, de obicei, la un model mai robust și mai precis.
- Alegerea algoritmului: Diferite sarcini necesită algoritmi diferiți. Evaluați-vă nevoile: dacă aveți nevoie de simplitate și viteză extremă pe hardware limitat pentru un obiect specific, Haar Cascades pot fi suficiente. Dacă precizia și generalizarea sunt prioritare, chiar și pe dispozitive mobile, YOLO sau SSD integrate cu OpenCV sunt alegeri superioare.
- Ajustarea parametrilor: Reglarea fină a parametrilor modelului, cum ar fi pragul de încredere (
confidencepentru modelele DNN) sauminNeighbors(pentru Haar Cascades), poate produce rezultate semnificativ mai bune și poate reduce falsele pozitive sau, invers, poate crește sensibilitatea modelului la detecții slabe. - Rămâneți la curent: Domeniul viziunii artificiale și al învățării profunde evoluează rapid. Fiți la curent cu cele mai recente tendințe, arhitecturi de rețele neuronale și progrese în detectarea obiectelor și OpenCV pentru a beneficia de cele mai performante soluții.
- Calitatea datelor negative: Asigurați-vă că imaginile negative sunt reprezentative pentru mediul în care clasificatorul va funcționa, dar nu conțin obiectul țintă. O cantitate mare și o varietate bună de imagini negative sunt esențiale pentru a reduce falsele pozitive.
Întrebări Frecvente (FAQ) despre Detectarea Obiectelor cu OpenCV
- Ce este OpenCV?
OpenCV (Open Source Computer Vision Library) este o bibliotecă open-source care conține numeroase funcții pentru a lucra cu imagini și videoclipuri în proiectele dumneavoastră de viziune artificială. - Cum instalez OpenCV?
Pentru Python, puteți utiliza managerul de pachete pip, rulând comandapip install opencv-python. Pentru alte limbaje, consultați documentația oficială OpenCV sau ghidurile de instalare specifice platformei. - Care sunt unii algoritmi populari pentru detectarea obiectelor?
Printre cei mai populari se numără YOLO, SSD și Faster R-CNN pentru abordările bazate pe învățare profundă, și Haar Cascades pentru metodele tradiționale de viziune artificială. - Cum poate fi folosit OpenCV pentru detectarea obiectelor în scenarii reale?
OpenCV poate fi utilizat într-o varietate de scenarii reale, cum ar fi recunoașterea facială, detectarea plăcuțelor de înmatriculare, numărarea mulțimilor, sisteme de asistență pentru șofer și robotică. Este versatil și puternic, fiind o soluție preferată pentru aplicațiile de viziune artificială. - Este OpenCV bun pentru începătorii în viziune artificială?
Absolut! OpenCV este ușor de utilizat, are o comunitate vastă și o mulțime de documentație și tutoriale disponibile, ceea ce îl face accesibil pentru începători. - Poate fi folosit OpenCV cu modele de învățare profundă?
Da! OpenCV poate fi integrat cu modele de învățare profundă folosind modulul DNN (Deep Neural Network), permițându-vă să rulați modele de învățare profundă pre-antrenate în cadrul OpenCV. - Cât de mici pot fi obiectele într-o imagine și totuși să fie detectate?
Acest lucru depinde de dimensiunea eșantioanelor (sample-urilor) pe care a fost antrenat modelul (pentru Haar Cascades) sau de rezoluția de intrare a modelului de învățare profundă și de parametrii de detecție (ex:minSizeîndetectMultiScale). Cu cât dimensiunea minimă specificată este mai mică, cu atât algoritmul va încerca să detecteze obiecte mai mici, dar acest lucru poate crește timpul de procesare și riscul de false pozitive. - De ce primesc multe false pozitive?
Numărul mare de false pozitive poate indica o lipsă de informații în seturile de date de antrenament (în special imagini negative insuficiente sau nereprezentative). Ajustarea parametrilor precumminNeighbors(pentru Haar Cascades) sau pragul deconfidence(pentru modelele DNN) și asigurarea că imaginile negative sunt reprezentative pentru fundalul real pot îmbunătăți semnificativ performanța clasificatorului.
Concluzie
Am deslușit misterul din spatele modului de a antrena și utiliza OpenCV pentru a detecta obiecte. De la elementele de bază ale OpenCV și detectării obiectelor, trecând prin metodele tradiționale bazate pe caracteristici Haar și până la o incursiune profundă în puterea învățării profunde cu modele precum MobileNet, YOLO și SSD, am acoperit aspectele esențiale.
Acum sunteți echipați cu cunoștințele și instrumentele necesare pentru a construi sisteme de detectare a obiectelor de top folosind OpenCV. Fie că vizați aplicații de recunoaștere facială, sisteme de securitate sau roboți autonomi, posibilitățile sunt nelimitate. Lumea este la picioarele voastre; mergeți înainte și creați ceva uimitor! Nu uitați, cu o putere mare vine și o responsabilitate mare. Folosiți-vă noile abilități cu înțelepciune.
Dacă vrei să descoperi și alte articole similare cu Detectarea Obiectelor cu OpenCV: Ghid Complet, poți vizita categoria Fitness.